RoboSpine - Robot interface module
Tutti i prezzi sono IVA inclusa
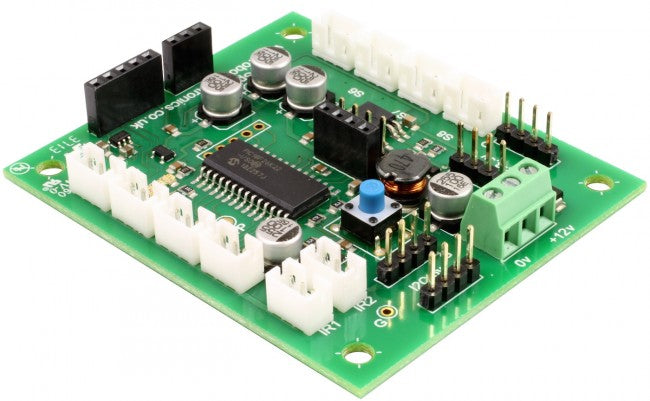
RoboSpine does for your robot what your spinal chord does for you. It connects eyes and ears to the brain and the brain to the muscles. RoboSpine connects sensors to the controller and the controller to the motors.
RoboSpine performs scanning of up to 8 x SRF01's, 2 x IR range sensors, a CMPS11, a TPA81 thermal sensor and the MD25/MD49 (part of the RD02/RD03 drive system) encoders, battery voltage etc. Your controller sends new motor speeds to the RoboSpine which passes them on to the MD25/MD49 and sends you back a 60 byte stream of sensor data. Your controller looks at this to decide what to make the motors do next. RoboSpine can connect directly to a bluetooth module and your PC can be the controller which gives you fanstatic visabiltiy into your robot and what it can see. We have an open source example written in C# to get you started.
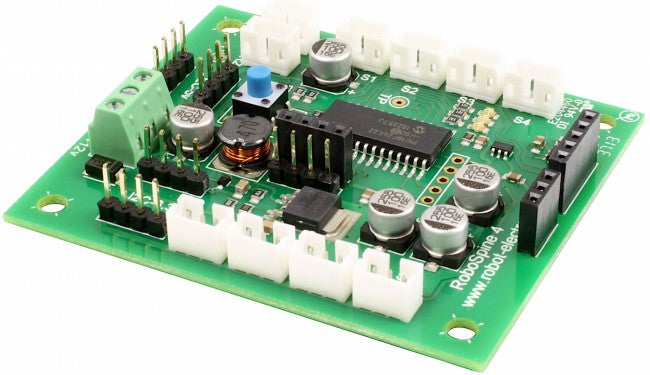
And you are not limited to the default modules the Robospine can connect to. By building in the same serial to I2C firmware that we use in our USB-I2C and USB-ISS modules, you have access to any I2C device you want to add. An on-board I2C level shifter means both 3.3v and 5v I2C levels are available on various connectors so you have huge flexibitlity.
The flexibility doesn't stop there. We have provided an "I2C hook" feature that will allow you to include read data from your own I2C devices into spare positions in the 60 byte data stream, so you don't need to issue separate commands which would otherwise slow things down.
And there is an on-board boot loader so you will never be stuck with out of date firmware. You will be able to download future versions free from our website.