



SKU 344887
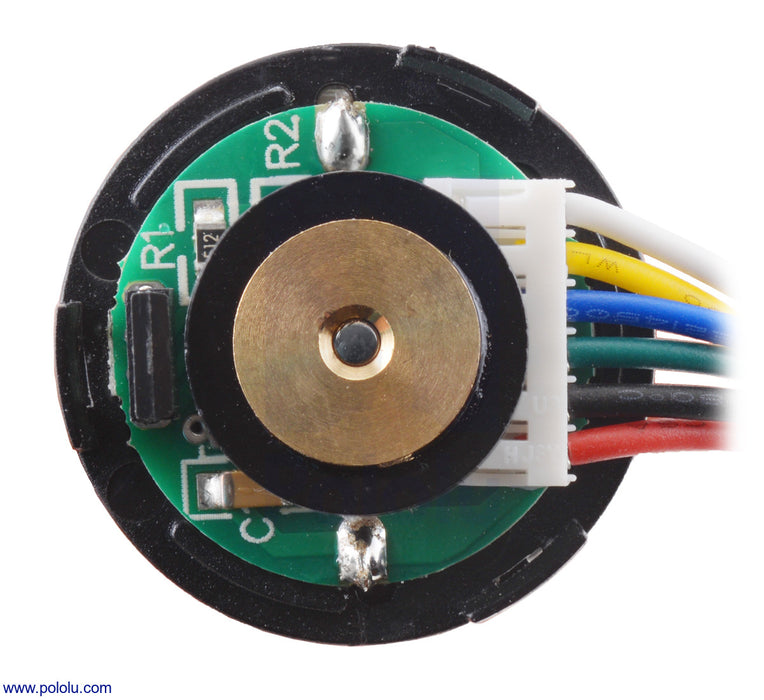
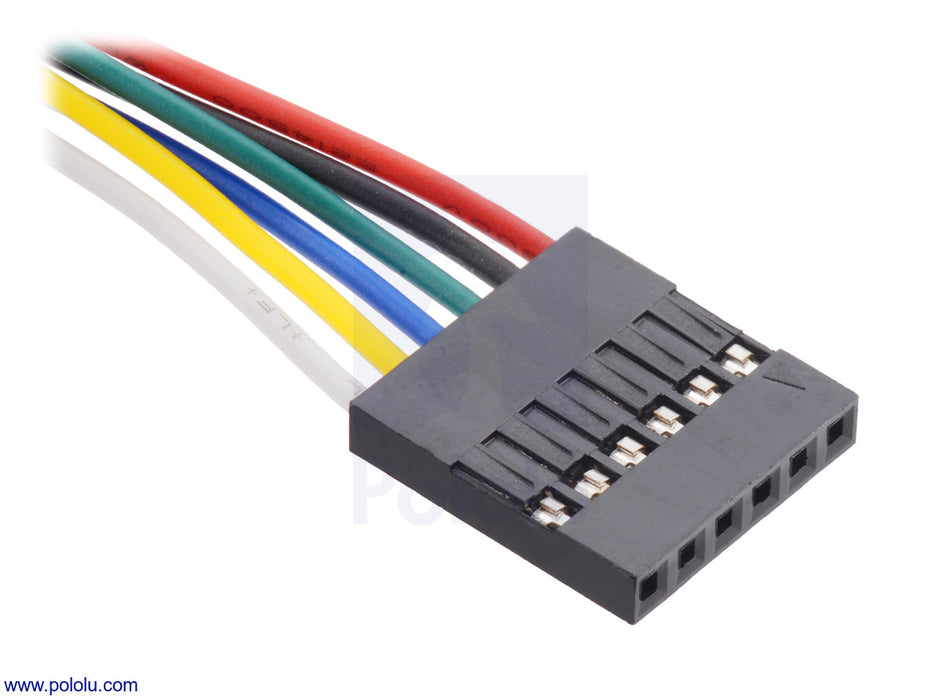
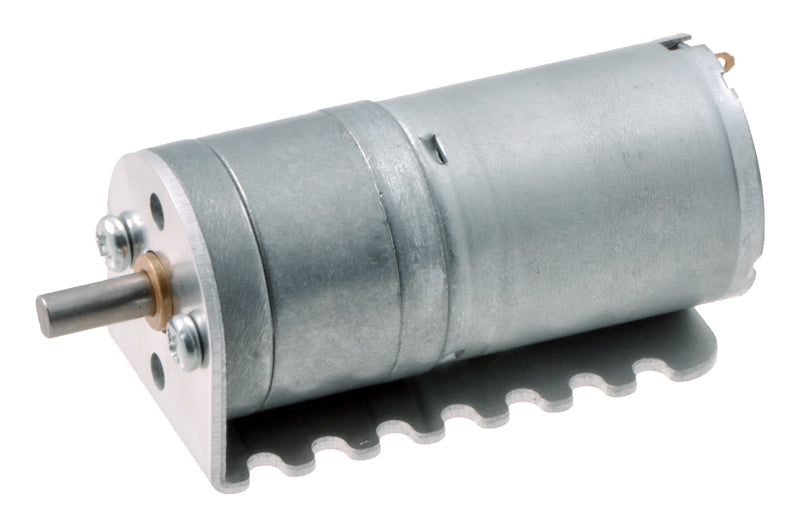
99:1 Metal Gearmotor 25Dx69L mm LP 12V with 48 CPR Encoder
Prezzo originale
€67,27
-
Prezzo originale
€67,27
Prezzo originale
€67,27
€67,27
-
€67,27
Prezzo attuale
€67,27
Tutti i prezzi sono IVA inclusa
Disponibilità:
Stock basso
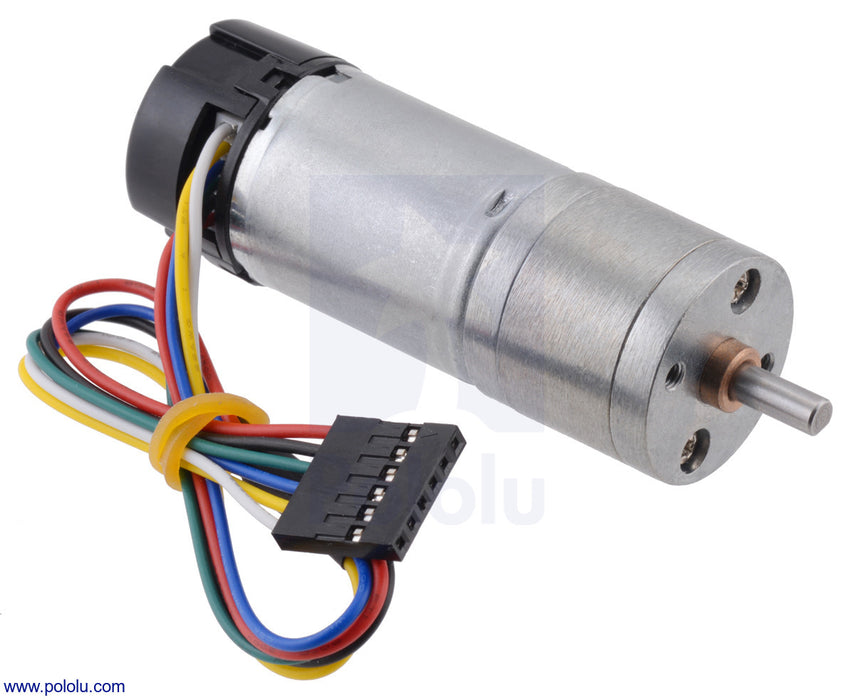
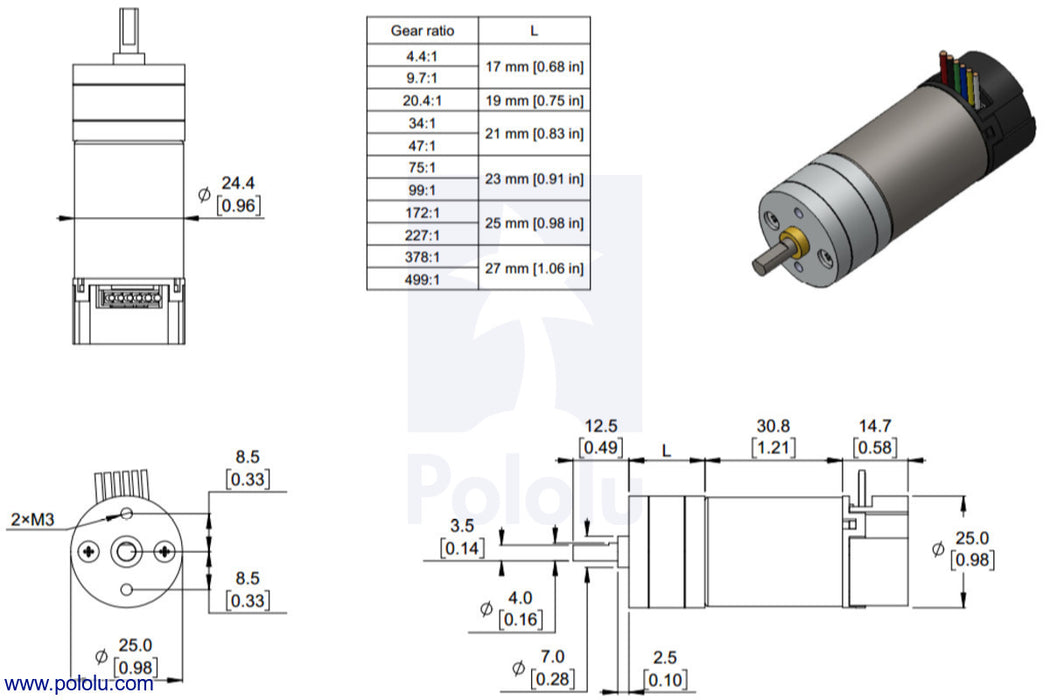
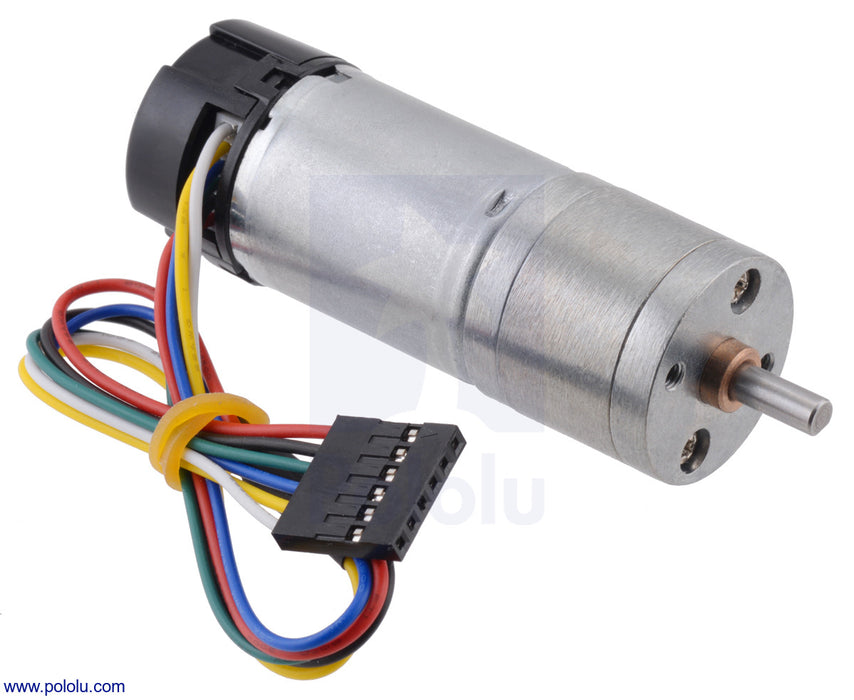
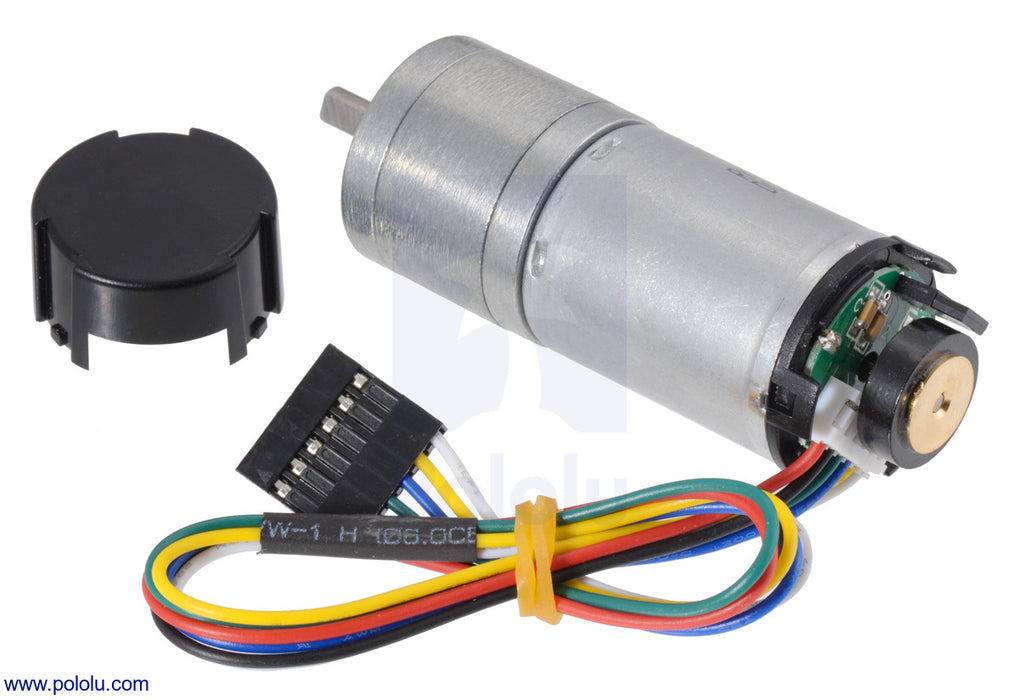
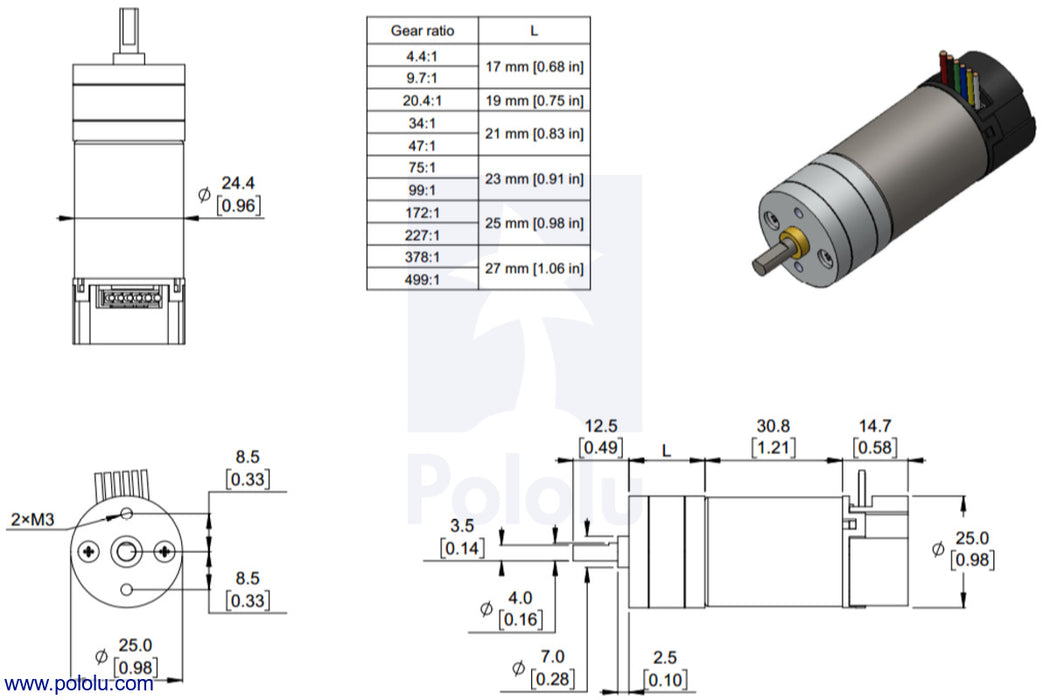
This gearmotor consists of a low-power, 12 V brushed DC motor combined with a 98.78:1 metal spur gearbox, and it has an integrated 48 CPR quadrature encoder on the motor shaft, which provides 4741.44 counts per revolution of the gearbox’s output shaft. The gearmotor is cylindrical, with a diameter just under 25 mm, and the D-shaped output shaft is 4 mm in diameter and extends 12.5 mm from the face plate of the gearbox. This gearmotor is also available without an encoder.
Key specifications:
| voltage | no-load performance | stall extrapolation |
|---|---|---|
| 12 V | 57 RPM, 60 mA | 8.7 kg⋅cm (120 oz⋅in), 0.9 A |